
Daniel Shin
I am a Master's student in Computer Science at Stanford University, focused on reinforcement learning, human-AI interaction, and multi-agent systems.
Before Stanford, I was an undergraduate researcher at UC Berkeley, where I was fortunate to be advised by Professors Daniel Brown ![]() , Anca Dragan
, Anca Dragan ![]() , and Sergey Levine
, and Sergey Levine  .
.
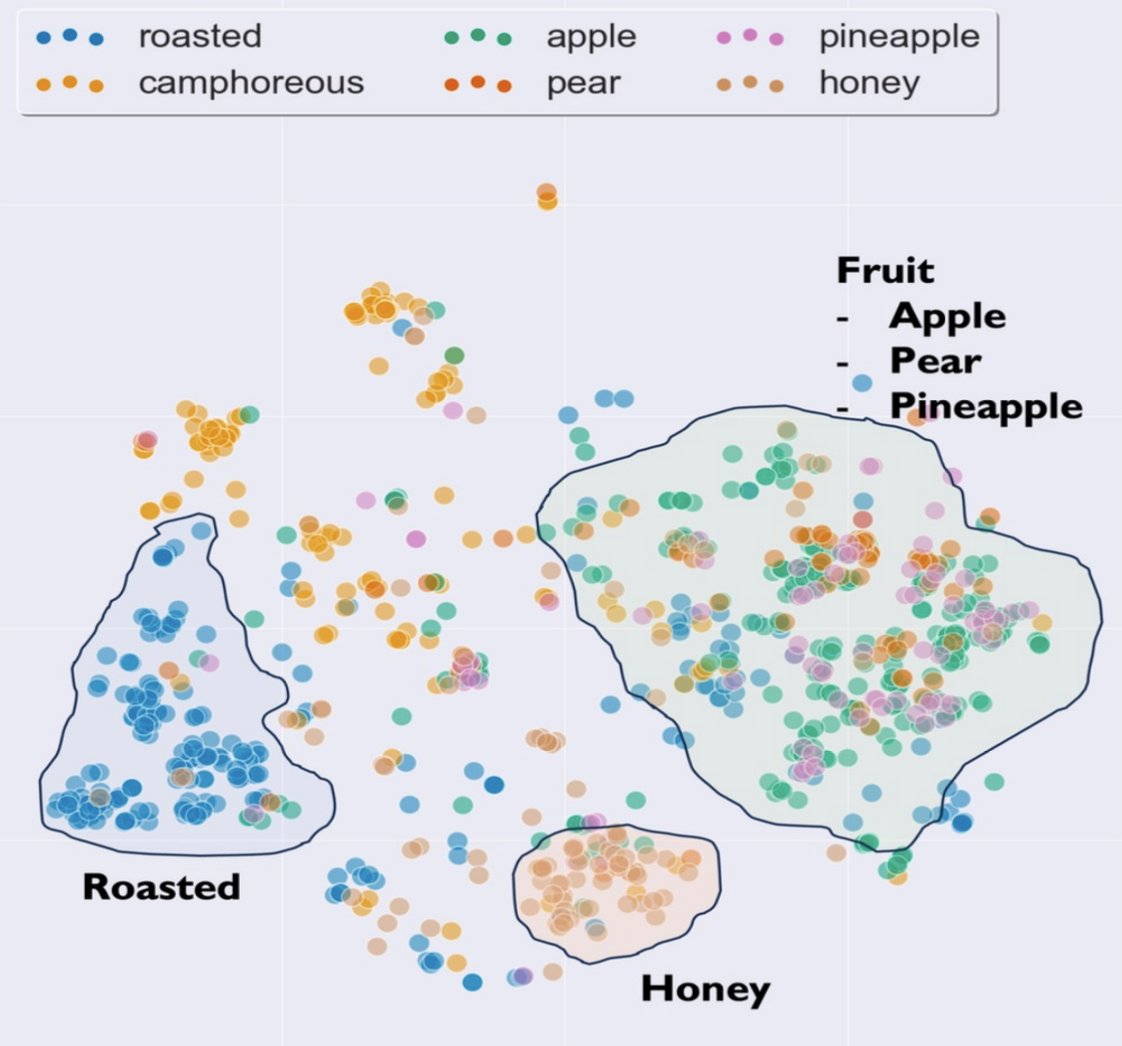
Previously, I have interned at ![]() Microsoft working on converting natural language to graph queries as a part of the AI security team, amazon working on streaming transformers to improve latency in self-checkout stores, and Sony AI working on multi-modal models for olfactory perception.
Microsoft working on converting natural language to graph queries as a part of the AI security team, amazon working on streaming transformers to improve latency in self-checkout stores, and Sony AI working on multi-modal models for olfactory perception.
📚 Publications
Please refer to my Google Scholar for more detail.
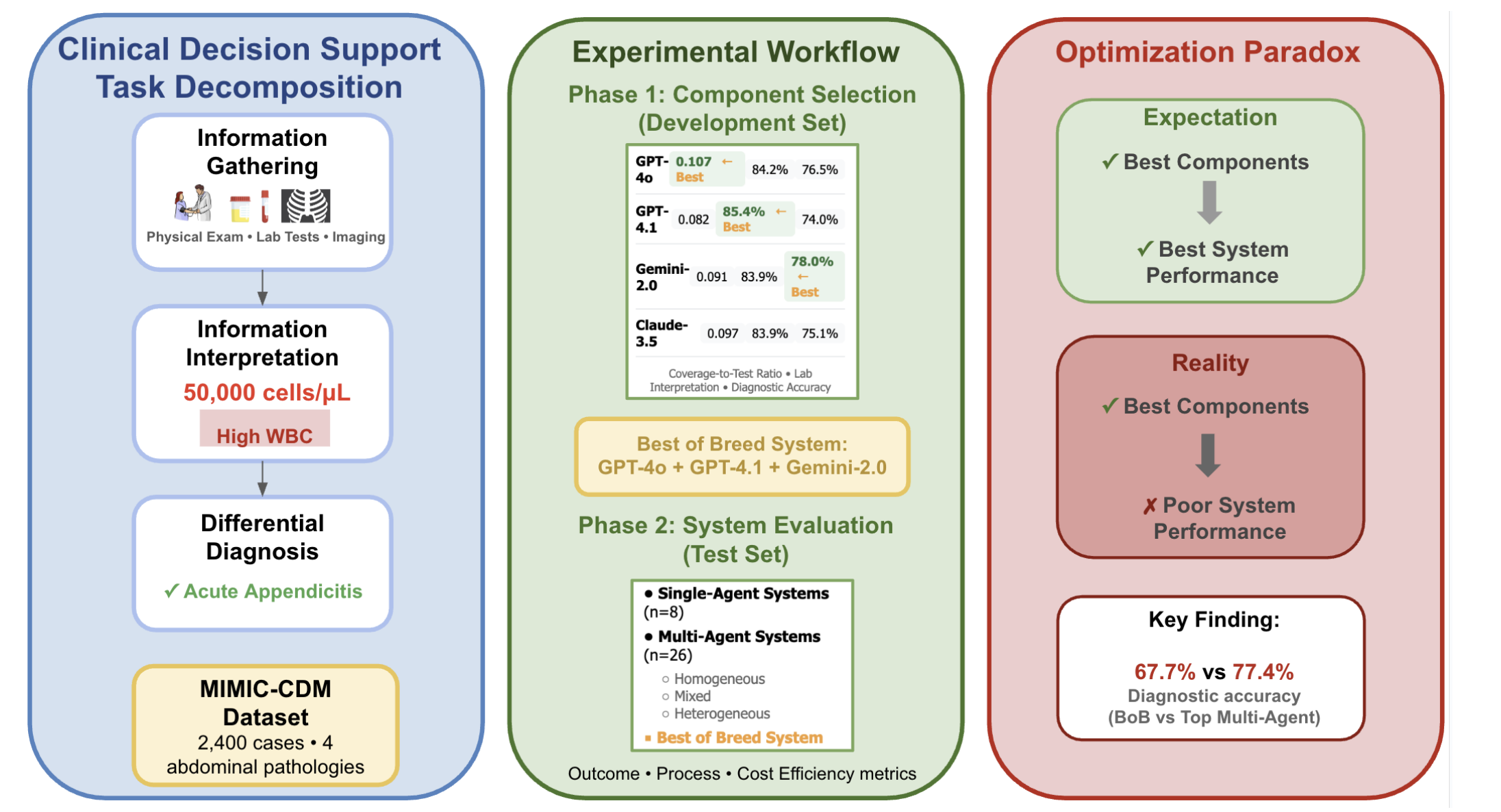
KDD Workshop on Evaluation and Trustworthiness of Agentic and Generative AI Models (oral), 2025
International Workshop on Multimodal Learning at SIGKDD, 2023
Transactions on Machine Learning Research (TMLR)

{kind=link}